|
|
| 1/144 MSV MS-06R ZAKUII |
■ボディの加工 その1
「MSVモデリングカタログ」を参考に工作しました。
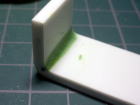
ボディを接着する前に首パーツを設置できるよう土台を作っておきます。
それから合わせ目を処理し、左右の肩関節を入れる為肩口一面をカットします。
その際、正面から見て肩から脇のラインが「ハの字」になるよう整えました・
キットの背中側からノコでスリットを入れ、0.5ミリプラバンを差し込み、肩関節の土台を作ります。
ポリキャップの深さを測ってからスリットの位置を調整しました。
pc-03プラサポ1とpc-03ポリキャップを組んで接着するところを決めます。
前後か左右、可動させたい方向を決めてから接着します。(写真は前後可動重視)
接続場所を選んだらポリキャップと同じ大きさ穴をあけています。
これはポリキャップが回転する際、干渉しないようにと言う事と、軸を深く差し込んだり調整しやすくする為です。
|
   |
■ボディの加工 その2
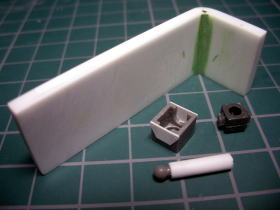
土台と同じサイズの穴をあけた1ミリプラバンで蓋をします。(穴は後で可動させながら大きく調整します)
ボディのモビルパイプが通る部分が気になったので、プラパイプで作り直しました。
パイプに両端のモールドは先に入れてから本体に接着します。 |
 |
■頭部の加工 その1
モノアイを可動化します。
bj-04プラサポ1とHGUCの余りのポリキャップLと、9.5ミリプラパイプをカットして広げたものを繋いでモノアイ基部を作りました。
キットの首関節をカットし、1ミリプラバンで延長したものに3.2ミリプラパイプとボールジョイントを繋いだものに通します。
|
   |
■頭部の加工 その2
元キットの口元が整形不良なのでダクトノズルを加工して作り直しました。
頭頂部のアンテナ差込部は凹モールドに。
蛇腹チェーンの保持にモビルパイプを後方に2個設置しました。
|
   |
■頭部の加工 その3
首を差し込む穴をあけプラ棒ごと差し込み、高さを調整しました。
後ろから見ると首の隙間が目立ったので襟もとにカバーをつけました。 |
 |
■腕の加工 その1
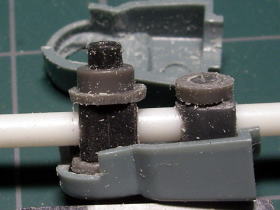
二の腕の関節を後はめできるようにしました。
pc-03プラサポ2をカットしたものとpc-03ポリキャップを組み込みます。
腕とも接続部をプラ棒が可動できるように切欠きます。
pc-03プラサポをカットしたものを左右に接着し、ポリキャップを内蔵します。
プラサポを接着するときは画像のようにプラ棒を通した状態で作業をするとやりやすいです。
|
   |
■腕の加工 その2
腕に二の腕接続用の土台を作ります。
手首にはpc-03プラサポの一部カットしたものを接着しました。
干渉するダボは上から見えないぐらいまで短くカットしました。
|
 |
■腕の加工 その3
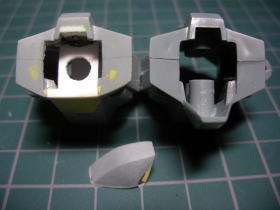
肩パーツの中にも可動用のポリと接続用の軸を内蔵させます。
可動用の軸は体とつながるので上下に動くようpc-03プラサポをサイズに合わせカットし、pc-03ポリキャップと組み合わせ、位置を決めてから接着します。
|
 |
■腕の加工 その4
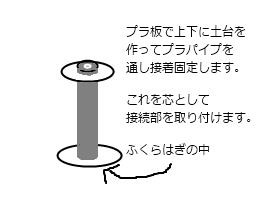
接続用に軸は1ミリ×2枚のプラバンの築層を可動用の軸に干渉しないように土台として中に貼り込みます。(キットのままだけだと差し込んだ軸が不安定そうだったので厚みを補強しました)
土台の中心に3ミリの穴をピンバイスであけプラ棒を差し込み接着固定します。 |
 |
■腕の加工 その5
手首の腕側にはプラサポとポリキャップを使いますが、空間が狭しので両方とも半分ぐらいに短くしてから使用します。
手首はキットの軸を切り取ってボールジョイントに交換して可動する様にします。
手首カバーは「だっちん堂」さんのものを使用しています。
こぶしは旧キットのものをパテで整形してから使用しています。
|
  |
■腕の加工 その6
スパイクアーマーの接続も関節技に置き換えました。
スパイクの先端を少しとがらせてあります。
(イメージとしてはあまり鋭角も変かなと思いまして鈍い感じで)
肩には斜めに取り付けてあります。
関節技の軸が細くて短いので3.2ミリのプラパイプで補強しました。
|
   |
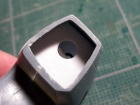
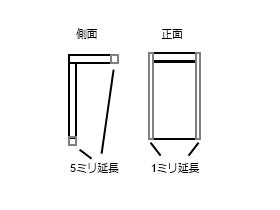
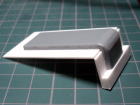
■腕の加工 その7
縦は大型化をする為1ミリプラバンを重ねました。
上下端で5ミリづつ、左右1ミリづつ大きくしました。
内側の角はポリパテで埋めてなだらかにしています。
|
   |
■腕の加工 その8
肩に取り付けるためにpc-03プラサポとpc-03ポリキャップ、ボールジョイントを組み合わせて基部を作っていきます。
プラサポには0.3ミリプラバンでディティールを追加しています。(ポリキャップに軸隠しでもあります)
縦の裏にプラバン等でディティールを追加してから接続部を接着しました。
|    |
■足の加工 その1
太腿と股間の接続には関節技5ミリに置き換えます。
元の軸を関節技が収まる長さまでカットし、受け側の軸を差し込み接着固定しました。
ひざの接続には画像のT字のプラサポを使おうと思いましたが却下。
代わりにHGUC余りのポリキャップJをひざに接続に使い、後はめ加工するために挟み込み部を2ミリづつ程削っています。
ポリキャップJが干渉しないよう挟み込みを削ったら4ミリのプラ棒とJを組み込んでプラ棒を接着固定合わせ目消しをします。
この後、太腿は3ミリ延長しました。 |
   |
■足の加工 その2
ふくらはぎのディティール類は表面処理にとても邪魔なので全部切り離してプラ等で作り直しました。
塗装後に接着しました。
ひざのアーマーも切り離して表面処理をしやすくしてから元通りに取り付けれるようにしています。
|
  |
■足の加工 その3
上側は芯の土台にプラサポとプラバンでひざの取り付け深さを調整して設置。
下側もプラバンで深さを調整して関節技を接着固定しました。
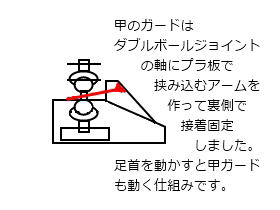
ふくらはぎとソールはダブルボールジョイントで接続。
ソールの関節技の受けは底にプラバンを数枚貼って固定、接着の土台としています。
甲のガードは切り取ってます。
|
  |
■足の加工 その4
前面のディティールも一部切り取って後で取り付けるようにしています。
 |
  |
■その他の加工 その1
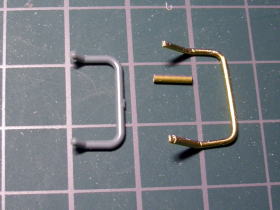
バックパックの釣り手?を真鍮線と真鍮パイプに置き換えました。
バックパックの取付位置も上方に変更。
|
 |
■その他の加工 その2
モビルパイプ下に0.25ミリプラバンでディティールを追加しました。
|
 |
■3回のサフチェック
■塗装
本体、ファントムグレー下地塗装
本体、セミグロスブラック
本体2、ニュートラルグレー
本体3、マルーン(ファンデーションホワイト下地塗装)
モビルパイプ等、ファンデーションホワイト
光沢クリアーで全体を保護コート後、すみ入れ、
金属部以外仕上げににつや消しクリアーでコート
■スミイレ
ニュートラルグレー(少量)+フラットブラック
ニュートラルグレー(少量)+ハルレッド
■デカール
約16枚使用
|
 |
|
|
|
